钢桶卷边封口机概述(3)
武汉金属容器二厂 王霖
二、异形桶封口机
异形桶封口机多采用桶身旋转式。其结构比圆桶封口机复杂。它除了同圆桶封口机一样具有桶的主旋转运动,轴向压紧运动和;压轮的直线,进绘运动之外,还必须具有压轮相对于桶的仿形运动。
(一)仿形运动的含义和必要性。下面通过分析异形桶封口过程的特殊性来说明仿形运动。
图7反映了圆桶和几种异形桶在封口过程中,压轮在进给的某一状态时其位置应具有的变化。图申O为桶旋转中心,A点为压轮在进给的某一状态时与桶卷边处的接触点。由于圆桶旋转时,旋转半径OA是不改变的(图7a),故圆桶封口过程中压轮只需逐渐向旋转的桶作径向逼近,压紧,即作直线进给运动,就能使整个桶沿处得以卷封。然而,对于异形桶而言,因旋转时旋转半径是变化的(图7b,7c),为了实现封口,压轮除了作直线进给运动之外,还必须随桶的旋转半径的变化而沿进给方向作相应的往复直线运动,即异形桶封口的仿形运动。正是在这种进给运动和仿形运动的共同作用下,异形桶桶底(顶)与桶身才能实现卷封。
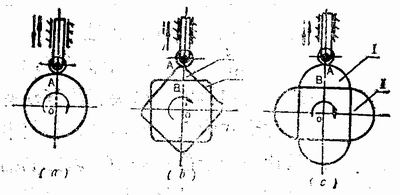
图7 压轮的仿形运动分析
(二)实现仿形运动的方法。实现异形桶封口的仿形运动一般采用凸轮机构。按其凸轮形式的不同,可分为内轨道式(即内接凸轮式)和外轨道式(即外接凸轮式)。下面分别介绍这两种凸轮仿形机构的结构和原理。
1.内轨道式仿形。图8为内轨道式凸轮仿形机构的结构简图。图中靠横为一端面具有凹槽的凸轮,此凹槽即为内轨道,内轨道的内、外圈与异形桶身为相似形(本例中为长方形)。靠模上固装着封口压盘。封口压盘的外形与异形桶桶盖的内周相同,以利于待封桶的套入。图中滚轮位于靠模的内轨道内,并通过轴承和芯轴安装于滑板上。滑板只能沿封口压盘的某一径向方向滑动。工作时,靠模和封口压盘绕其轴心旋转,位于封口压盘上的待封口桶随之旋转,靠模通过内轨道和滚轮带动滑板作往复直线运动。由于压轮架安装于滑板上,所以压轮架上的压轮会随滑板一起作往复直线运动。这一运动随桶的旋转半径的变化而变化。它使压轮到旋转的异形桶桶沿的距离保持不变,故为仿形运动。如果压轮在作仿形运动的同时,又逐渐向桶沿靠拢作进给运动,那末,异形桶的封口就得以实现。
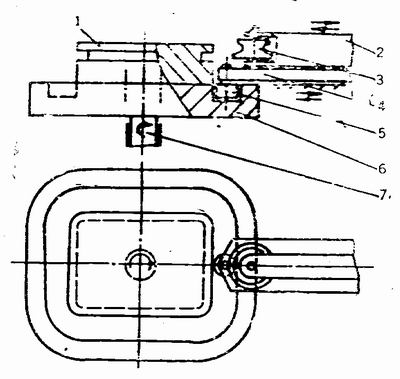
图8 内轨道式仿形结构简图
1-封口压盘;2-压轮架;3-压轮;4-滑板;5-滚轮;6-靠模;7-轴
以上谈到的与仿形运动相配合的进给运动,可由多种传动方式来实现,如棘轮机构、,凸轮机构、杠杆机构或液压传动等等。现以棘轮机构为例叙述这种进给运动。
图9表示了棘轮进给机构与内轨道式凸轮仿形机构相配合,共同完成压轮的仿形运动和进给运动的结构和原理。
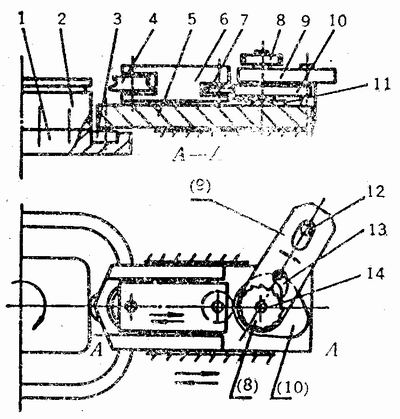
图9 仿形棘轮进给机构简图
1-靠模;2-封口压盘;3-滚轮;4-封口压轮;5-滑板;6-压轮架;7-滚轮;8一棘轮;
9-摆杆;10-凸轮;11-弹簧;12-圆销;13 -棘爪;14-轴
该图滑板和压轮获得仿形运动的原理与图8完全相同。为了获得进给运动,滑板上安装有轴14,轴14上固装有凸轮10和棘轮8,摆杆9前端的孔滑套于该轴上,后端的长形槽活套在圆销12上,圆销又固装于机架上棘爪13的支点装在摆杆上。因此,借助于滑板的仿形运动(往复直线运动),摆杆会绕圆销摆动(此时摆杆的纵洵位移通过其长形槽和圆销的相对运动得到了补偿),而摆杆的摆动能使棘爪拨动棘轮。靠模每转一周,滑板作一次往复直线运动,棘爪就会拨动一次棘轮,凸轮即随之转动定的角度。当凸轮转一个角度且其升程增加时,通过滚轮7压轮架6被迫沿滑板上的导轨向左(即向待封桶)移动一小段距离。如果靠模不断地旋转,滑板就会不断地作往复直线运动。这种仿形运动通过棘轮机构后,则使凸轮有规律地作间歇转动,这样,压轮就能有规律向桶沿作间歇性的靠拢,从而完成进给运动。当凸轮转动但升程不再增加时,压轮停止进给。当凸轮转至最小升程时,借助于弹簧11,压轮架带着压轮向右回至初始位置。到此,整个进给运动结束。
本例中,驱动棘轮进给机构的动力来自于仿形运动,它不需单独的动力。而且,该种机构比较简单、紧凑.其缺点是调试比较困难,同时由于该机构进给运动是间歇的,所以进给不平稳,有时甚至有冲击。
2.外轨道式仿形毒外轨道式凸轮仿形机构的基本原理见图10,图中靠模6是一个具有特殊轮廓的凸轮。叉架3的一端装有封口压轮1,另一端装有滚轮5,滚轮5借助于弹簧的作用总是紧贴着靠模的轮廓(即外轨道)。叉架的中部铰接于芯轴2上。工作时,靠模、封口盘和待封桶一起绕轴心旋转。如果此时将芯轴的位置固定,那末,随着靠模与滚轮接触点B处的旋转半径的变化,滚轮的位置不断变化,通过叉架的摆动,滚轮的每一位置都对应着封口压轮的,一特定位置。而这一特定位置又是随异形桶旋转半径的变化而变化的。它使封口压轮到旋转的异形桶桶沿距离保持不变,因而封口压轮获得仿形运动。当然,要获得这一运动,必须设计相应的靠模轮廓即外轨道。从图10可看出,靠模轮廓与异形桶或封口盘的形状有很大差异,而且不问形状和尺寸的异形桶,其靠模轮廓是不相同的口但是,只要根据异形桶的形状和尺寸,并把滚轮、叉架、压轮和靠模相互之间的运动关系搞清楚,就可用凸轮反转法设计出靠模轮廓来。
为了提高封口卷层的精度,靠模最好设计得比封口盘大一些,以便靠模轮轮廓的误差反映到封口卷层上较小。
如果设法使该图中的芯轴沿机架上的导轨逐渐向桶的轴心方向靠拢,那末就能获得与外轨道式仿形运动相配套的进给运动。

图10 外轨道式仿形原理
1-封口压轮;2-芯轴;3-叉架;4-封口盘;5-滚轮;6-靠模
3.内、外轨道式仿形机构的比较。从靠模的设计而言。内轨道式优于外轨道式。因为内轨道式中靠模凹槽的形状与异形桶的横断面为相似形,所以靠模容易设计,而外轨道式中靠模轮廓完全不同于异形桶,它必须根据桶形由压轮、滚轮及叉架等构件的相对位置和运动,用凸轮反转法逐点求得,因此很麻烦且不易求得准确的轮廓。
但从磨损和修磨来看,外轨道式修磨比较方便,而内轨道式滑道的内、外侧面都易磨损,且磨损后不易修磨。
(三)异形桶封口机图例。为较全面地了解异形桶封口机的工作原理和过程,现以一整台封口机为例加以说明。图11为一台单头立式异形桶封口机,该机的仿形机构采用内轨道式,进给机构为凸轮一杠杆式,轴向压紧则为气动式。现将整机的工作过程简述如下:
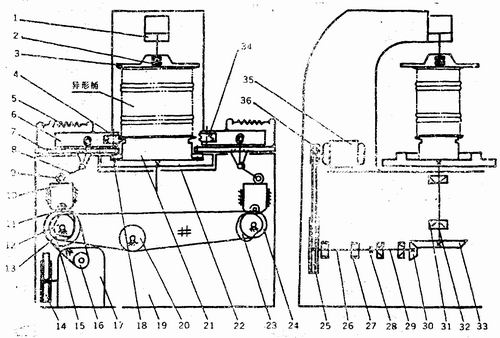
图11 异形桶单头立式封口机传动图例
1-气缸;2-轴承;3-尾盘;4-头道封口压轮;5-弹簧;6-压轮架;7-滑板;8-叉形杆;9-滚轮;10-滑块;11-滚轮;12-头道凸轮;13-链轮;14-大皮带轮;15-链轮;16-链轮;17-减速器;18-滚轮;19-机架;20-张紧链轮;21-封口盘;22-靠模;23-道凸轮;24-链轮;25-皮带轮;26-轴;27-轴承;28-联轴节;29-轴;30-锥齿轮;31-轴承;32-主轴;33-锥齿轮;34-封口压轮;35-电动机;36-皮带轮道
1.轴向定位。首先待封口桶(图中为圆形桶)套于封口盘21上,然后使气缸1中的活塞下行,尾盘3则压住桶。
2.主旋转运动。电动机35通过一级皮带传动使轴26旋转,再通过联轴节28,使轴29旋转c该轴上固装的锥齿轮30与主轴32上的锥齿轮33啮合,则使主轴转动。此时,主轴上固装的靠模22和封口盘21也随之转动。若将待封口桶装于封口盘上,待封桶则获得了主旋转运动。
3.仿形运动。由于滑板7的一端安装着滚轮18,而滚轮18位于靠模22的内滑道里,因此,旋转的靠模能使滑板沿着机架上的导轨作左右平移。压轮架6装于滑板上,故压轮4获得直线仿形运动。图中左右对称安装有两套仿形机构,以满足头、二道封口的需要。
4.头道压轮的进给。该机的进给机构采用了单独的动力。由电动机通过小皮带轮带动大皮带轮14旋转。皮带轮14的轴为减速器17的输入轴,其输出轴上装有链轮16,通过链条使链轮13旋转。因凸轮12与链轮13共轴,所以凸轮12被带动旋转。当凸轮升程增加时,则可通过滚轮11推动滑块10沿机架的垂直导轨向上移动。此时滑块10的上平面向上推动滚轮9而使叉形杆8绕其支点作顺时针摆动。因叉形杆的上端铰连于左压轮架6上,左压轮架则向右平移,其上的头道压轮4获得了进给运动。当凸轮12转过最大升程后,压轮不再进给。凸轮转至最小半径时,滑块10靠自重下移,同时,左压轮架弹簧5的作用回到最左位置,叉形杆则逆时针摆动,滚轮9回到滑块10上。
值得注意的是,工作中滚轮9的运动是一合成运动,一方面凸轮9同滑板7一起作仿形运动,即作左右移动,另一方面它又绕叉形杆的支点作上、下摆动,以使封口压轮获得进给运动。
5.二道压轮进给。当头道压轮进给结束后,三道压轮34开始进给。二道压轮进给的动力也来源于带动头道压轮进给的电动机。由于与链轮13共轴的,除了凸轮12外,还有链轮15,它又通过链条使链轮24旋转,同链轮24共轴的凸轮23则随之旋转。与头道压轮获得进给的道理相同,旋转的凸轮23使二道压轮获得了进给运动。
6。取桶。当二遭压轮进给完毕并回位后,主旋转运动停止,气缸1中的活塞上行,尾盘3上升,已封口桶则可取出,到此一个循环结束。

