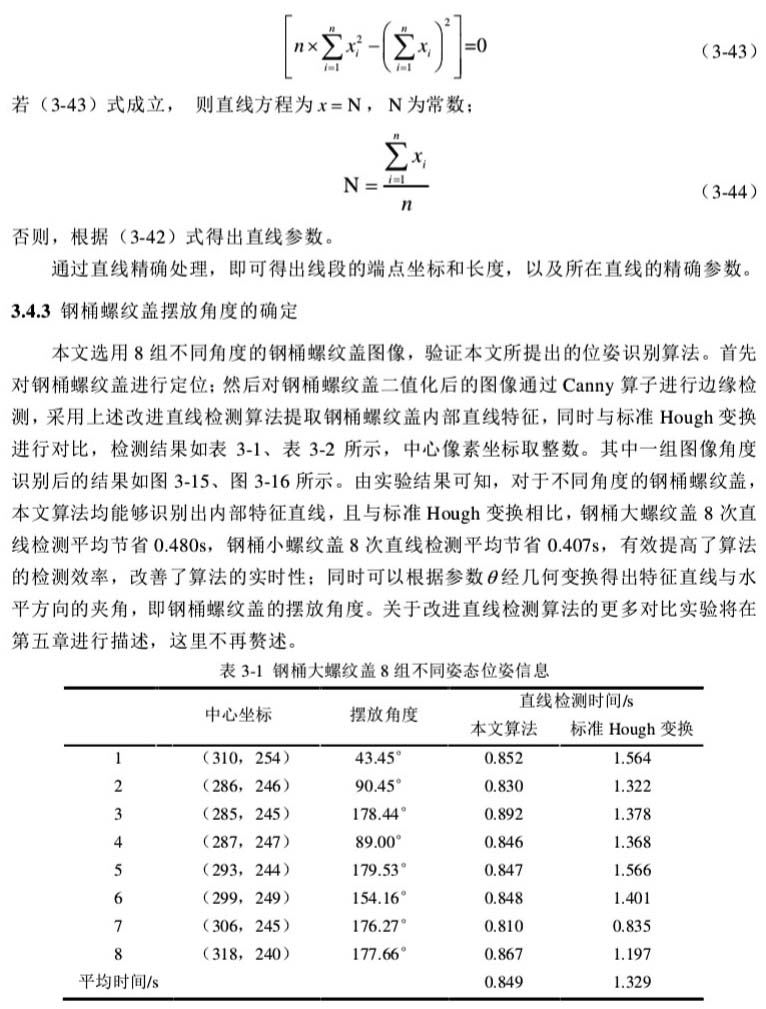
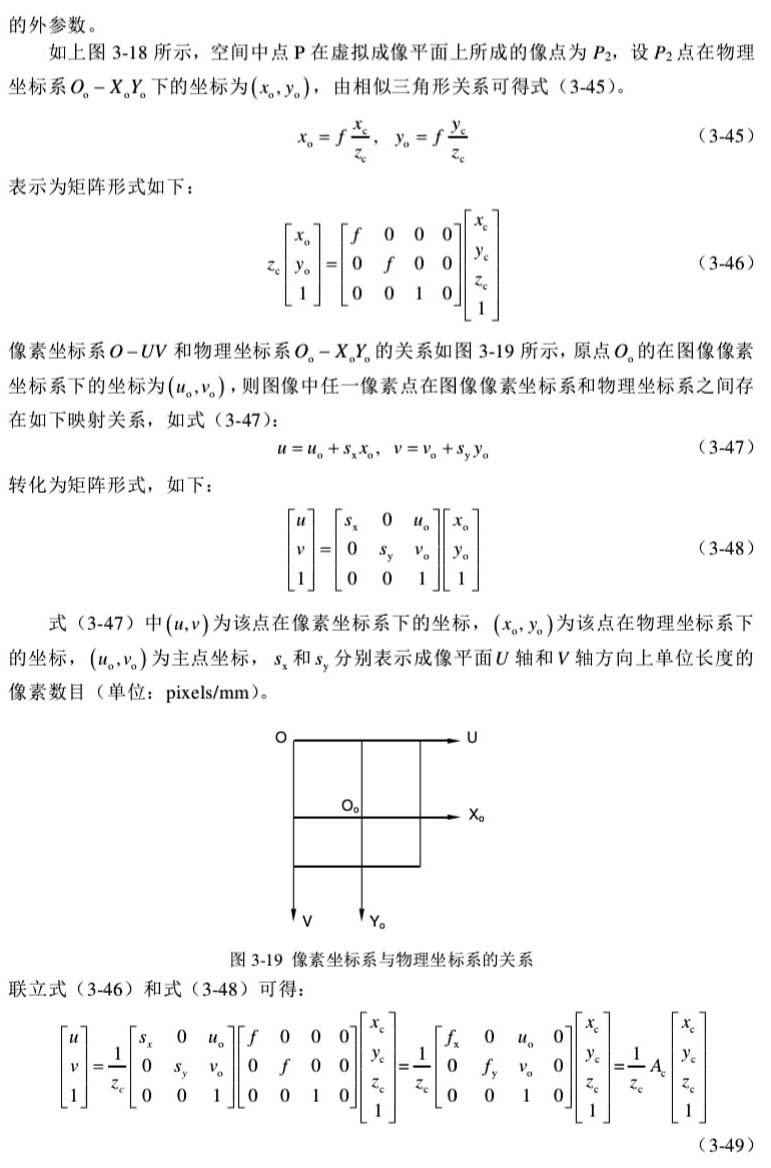
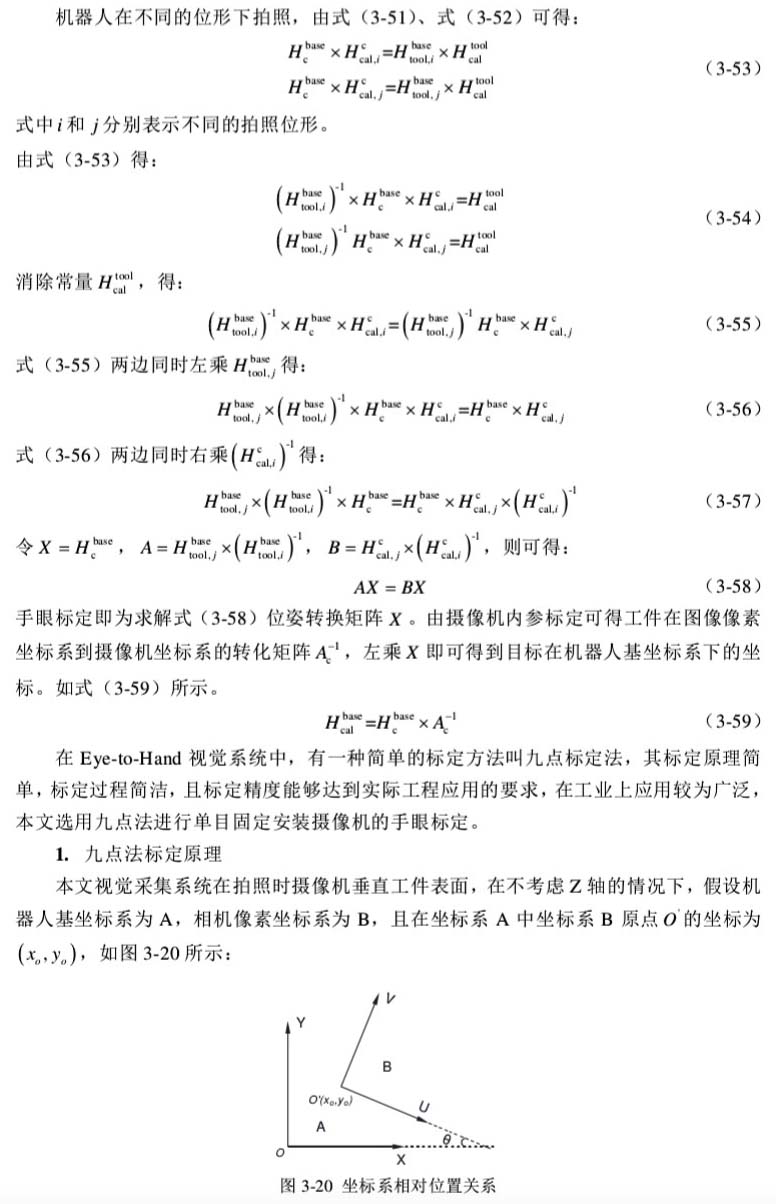
|
钢桶视觉的机器人螺纹盖装配技术(3)-钢桶螺纹盖视觉识别定位系统
文/徐超
第三章 钢桶螺纹盖视觉识别定位方法
3.1 引言
在基于视觉的机器人钢桶螺纹盖装配系统中,视觉系统是本文的重点研究内容。视觉定位精度的高低是机器人实现识别抓取的前提。本章将从图像预处理、钢桶螺纹盖定位算法、钢桶螺纹盖角度识别算法以及机器人手眼标定四个方面展开研究,对视觉定位方案做进一步的描述,并针对标准Hough变换进行直线检测时存在的问题,提出一种基于改进随机Hough变换的直线检测算法用于钢桶螺纹盖角度识别。
3.2 图像预处理
由于光学成像系统受光照情况以及自身硬件等诸多因素的影响,工业相机采集到的原始图像往往不能满足后续图像处理及特征识别的要求,因此为提高图像的质量以及突出图像中的特征信息,需要对图像进行预处理。图像预处理[42]是在图像进行分析和特征提取之前对图像进行矫正、去燥、锐化等相关操作,从而改善图像质量,增强图像信息的一种图像处理过程。经预处理后的图像,特征信息更加明显且易于提取,从而便于后续进行图像定位及特征识别。机器视觉中的图像预处理不考虑图像降质,只需要突出感兴趣区域的特征信息,常用的图像预处理方法主要有图像平滑(去燥)、图像锐化(增强)、图像二值化等。
3.2.1 拉普拉斯线性锐化滤波
图像增强是指在某种特定的需求下,有目的性地增强整幅图像或某些局部区域的特征信息,图像增强的方法主要分为两大类:空域增强法和频域增强法,空域增强法直接对图像中像素本身进行处理,表示为:
g(x, y) =E{f( x, y)} (3-1)
式中,g(x, y)表示增强后的图像,E{·}表示图像增强操作,f(x, y)表示原始图像;频域增强法是指通过离散傅里叶变换将数字图像信息从时域、空域转化到频域,并对转化后的频谱进行处理,最后再由傅里叶逆变换转换回时域、空域信号的过程。通常情况下,通过低通滤波去除图像中的噪声信息,通过高通滤波增强图像的边缘信息。与频域增强法相比,空域增强法更加直观易懂,不需要进行图像域的转换,因此本文图像处理算法均在空域中进行。
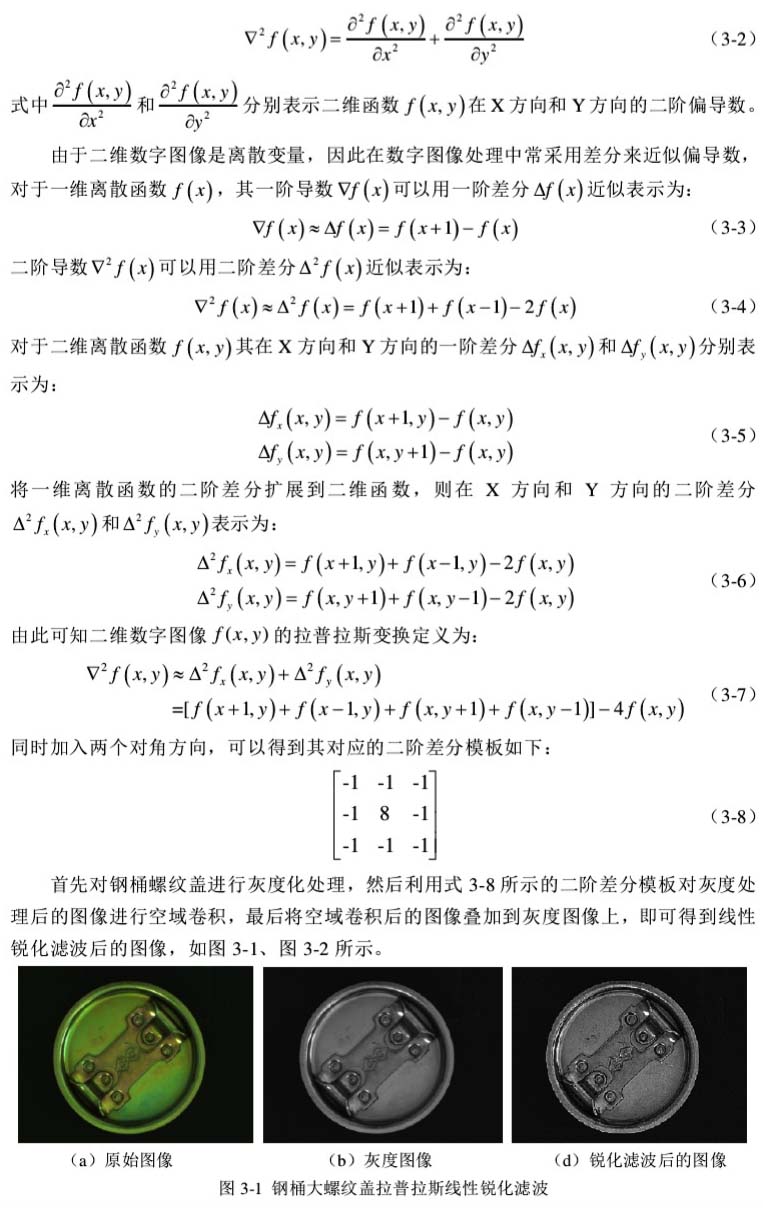
图像锐化是一种常用的图像增强方法,是指对图像中某些特征如边缘、角点等灰度值变换明显的区域进行增强,同时清除或减弱图像中灰度值变化缓慢的区域,图像的锐化滤波通常采用一阶或二阶差分算子。一阶差分算子利用图像梯度突出边缘和细节,主要用于图像的边缘检测;二阶差分算子是线性算子,通过将线性算子提取的边缘和细节叠加在原图像上,以此来增强图像的边缘信息。拉普拉斯算子是常用的线性二阶微分算子,二维函数f(x, y)的拉普拉斯变换定义为:

|

