|
【专利介绍】钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人
申请号:CN201810738283
公开号:CN108890300A
IPC分类号:B23P23/04; B24B9/04; B24B41/04; B24B45/00; B25J11/00
发明人:宋宏亮
摘要
本发明公开了一种钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,包括设备机架,位于设备机架的一侧安装有焊点清除刀具,位于设备机架另一侧的安装轴架底端均安装有打磨头,设备机架底面设有多个驱动轮装置,驱动轮装置两侧设备机架上分别设有焊缝导向装置,设备机架的两侧固定设有多个磁铁机架,磁铁机架底端固定设有磁铁块,设备机架的上端设有吸尘设备。本发明通过多个磁铁块,为设备提供磁力吸引力,使设备的驱动轮、刀具以及砂包贴紧钢桶表面,当设备沿着焊缝行走时,不会使设备掉落,通过焊点清除刀具对焊点进行清除,打磨头将清除焊点的钢桶表面打磨光滑,焊点清除产生的碎屑通过吸尘设备吸附收集,实现焊点清除的自动化操作。
权利要求书
1、一种钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,其特征在于:包括设备机架(1),所述设备机架(1)两侧的底面上贯穿设有多个焊接套管(102),所述焊接套管(102)内均固定设有安装轴架(3),位于设备机架(1)一侧的安装轴架(3)底端均安装有焊点清除刀具(4),所述焊点清除刀具(4)包括第一电机(41)、旋转刀座(42)和刀具安装机构(43),所述旋转刀座(42)活动安装在安装轴架(3)的底端,且旋转刀座(42)的转轴固定连接第一电机(41)的驱动轴,所述第一电机(41)安装在安装轴架(3)上,所述旋转刀座(42)上竖向贯穿设有多个安装槽(4201),所述安装槽(4201)内固定设有刀具安装机构(43);
所述刀具安装机构(43)包括连接块(431)、上限位轴(432)、第二弹簧(433)、下限位轴(434)、连接板(435)、刀具安装座(436)、磁铁片(437)和刀具(438),所述连接块(431)固定焊接在安装槽(4201)上端,且连接块(431)下端固定设有上限位轴(432),所述上限位轴(432)固定连接第二弹簧(433)的一端,所述第二弹簧(433)的另一端固定连接下限位轴(434),所述下限位轴(434)固定安装在连接板(435)上,所述连接板(435)通过螺栓安装在刀具安装座(436)顶端,所述刀具安装座(436)位于安装槽(4201)的外底端,该刀具安装座(436)上固定设有刀具(438);
位于设备机架(1)另一侧的安装轴架(3)底端均安装有打磨头(5),所述打磨头(5)包括旋转座(51)、金属环(52)、砂包(53)和第二电机(54),所述旋转座(51)活动安装在安装轴架(3)的底端,且旋转座(51)的转轴固定连接第二电机(54)的驱动轴,所述第二电机(54)安装在安装轴架(3)上,所述旋转座(51)底端通过螺栓固定连接金属环(52),所述金属环(52)底端固定安装有砂包(53);
所述设备机架(1)底面的中间位置上设有多个驱动轮装置(6),所述驱动轮装置(6)两侧设备机架(1)底面上分别设有焊缝导向装置(7),所述设备机架(1)的两侧固定设有多个磁铁机架(101),所述磁铁机架(101)底端固定设有磁铁块(2),所述设备机架(1)的上端通过螺栓固定设有吸尘设备防护罩(8),所述吸尘设备防护罩(8)内固定设有吸尘设备(9),所述吸尘设备(9)两侧的设备机架(1)上贯穿设有吸尘通槽(103)。
2、根据权利要求1所述的钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,其特征在于:所述安装轴架(3)包括圆柱销(31)、第一弹簧(32)、球杆(33)、球头(34)、球座(35)和连接支架(36),所述圆柱销(31)固定安装在焊接套管(102)的上端,该圆柱销(31)底端设有上连接件(3101),所述上连接件(3101)固定连接第一弹簧(32)的一端,所述第一弹簧(32)的另一端固定连接下连接件(3301),所述下连接件(3301)安装在端盖(3302)上,所述端盖(3302)通过螺栓固定安装在球杆(33)的顶端,所述球杆(33)的底端固定设有球头(34),所述球头(34)活动卡接在球座(35)内,所述球座(35)的底端固定设有连接支架(36),所述连接支架(36)的下端分别连接有焊点清除刀具(4)和打磨头(5)。
3、根据权利要求2所述的钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,其特征在于:所述球座(35)的上端通过螺栓设有两个球座端盖(3501),所述球座端盖(3501)为半圆环形结构。
4、根据权利要求1所述的钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,其特征在于:所述刀具(438)分为直形刃刀具和弧形刃刀具,所述直形刃刀具和弧形刃刀具交替均匀分布在刀具安装座(436)底端,所述刀具安装座(436)上设有磁铁片(437)。
5、根据权利要求1所述的钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,其特征在于:所述驱动轮装置(6)的数量为两个,且对称分布在设备机架(1)的底端,所述驱动轮装置(6)包括轮架(61)、滑块(62)、第三弹簧(63)、驱动轮(64)、转轴(65)、耐磨套(66)、第三电机(67)、轴承(68)和轴承端盖(69),所述轮架(61)焊接安装在设备机架(1)的底端,且轮架(61)的两端内侧竖向设有滑槽(6101),所述滑槽(6101)内滑动设有滑块(62),所述滑块(62)内固定设有轴承(68),所述轴承(68)外侧的滑块(62)上设有轴承端盖(69),且两个轴承(68)内圈固定连接转轴(65)的两端,所述转轴(65)上固定套接有两个驱动轮(64),两个所述驱动轮(64)之间的转轴(65)上设有耐磨套(66),所述转轴(65)的一侧固定连接第三电机(67),所述第三电机(67)安装在滑块(62)上,所述滑块(62)上端通过第三弹簧(63)固定连接轮架(61)的内底端。
6、根据权利要求1所述的钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,其特征在于:所述焊缝导向装置(7)包括安装板(71)、支撑架(72)、连接架(73)、连接座(74)、磁性导向轮(75)、磁铁轮(76)和导向轮转轴(77),所述安装板(71)固定焊接在设备机架(1)的底端,且安装板(71)固定设有支撑架(72),所述支撑架(72)底端固定设有连接架(73),所述连接架(73)通过开口销活动安装在连接座(74)的固定耳(7401)上,所述连接座(74)的下端贯穿设有导向轮转轴(77),所述导向轮转轴(77)上套接有磁性导向轮(75),且连接座(74)底端的两侧安装有多个磁铁轮(76)。
7、根据权利要求6所述的钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,其特征在于:所述连接架(73)的两端设有限位板(7301),所述限位板(7301)位于固定耳(7401)的两侧,所述磁性导向轮(75)上外表面为内凹结构。
8、根据权利要求1所述的钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,其特征在于:所述吸尘设备(9)为叶轮式吸尘机,且吸尘设备(9)下端的吸尘设备防护罩(8)安装有收集斗(801)。
说明书
钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人
1、技术领域
本发明涉及焊接技术领域,具体为一种钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人。
2、背景技术
在圆桶焊接技术领域中,当制作直径比较大的钢桶管道时,需要将钢板卷制成圆柱型,然后在对接的位置焊接,将焊接好的两个圆桶对接再焊接,因此管道中存在直焊缝与环形焊缝,由于管道应用场合比较特殊需要对焊缝周边的焊点清除以及人工失手焊出的多余焊点清除掉。目前清除的方式是人工用角磨机清除,在车间,工人先通过手工使用角膜机,然后将相关现处的位置进行对应的打磨抛光,打磨工作会产生大量的粉尘,造成车间空气污染严重。目前该焊接车间工人全部需要带防尘口罩进入车间工作,否则会导致尘肺病等严重疾病,为此我们提出一种钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人用于解决上述问题。
3、发明内容
本发明的目的在于提供一种钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,包括设备机架,所述设备机架两侧的底面上贯穿设有多个焊接套管,所述焊接套管内均固定设有安装轴架,位于设备机架一侧的安装轴架底端均安装有焊点清除刀具,所述焊点清除刀具包括第一电机、旋转刀座和刀具安装机构,所述旋转刀座活动安装在安装轴架的底端,且旋转刀座的转轴固定连接第一电机的驱动轴,所述第一电机安装在安装轴架上,所述旋转刀座上竖向贯穿设有多个安装槽,所述安装槽内固定设有刀具安装机构;
所述刀具安装机构包括连接块、上限位轴、第二弹簧、下限位轴、连接板、刀具安装座、磁铁片和刀具,所述连接块固定焊接在安装槽上端,且连接块下端固定设有上限位轴,所述上限位轴固定连接第二弹簧的一端,所述第二弹簧的另一端固定连接下限位轴,所述下限位轴固定安装在连接板上,所述连接板通过螺栓安装在刀具安装座顶端,所述刀具安装座位于安装槽的外底端,该刀具安装座上固定设有刀具;
位于设备机架另一侧的安装轴架底端均安装有打磨头,所述打磨头包括旋转座、金属环、砂包和第二电机,所述旋转座活动安装在安装轴架的底端,且旋转座的转轴固定连接第二电机的驱动轴,所述第二电机安装在安装轴架上,所述旋转座底端通过螺栓固定连接金属环,所述金属环底端固定安装有砂包;
所述设备机架底面的中间位置上设有多个驱动轮装置,所述驱动轮装置两侧设备机架底面上分别设有焊缝导向装置,所述设备机架的两侧固定设有多个磁铁机架,所述磁铁机架底端固定设有磁铁块,所述设备机架的上端通过螺栓固定设有吸尘设备防护罩,所述吸尘设备防护罩内固定设有吸尘设备,所述吸尘设备两侧的设备机架上贯穿设有吸尘通槽。
优选的,所述安装轴架包括圆柱销、第一弹簧、球杆、球头、球座和连接支架,所述圆柱销固定安装在焊接套管的上端,该圆柱销底端设有上连接件,所述上连接件固定连接第一弹簧的一端,所述第一弹簧的另一端固定连接下连接件,所述下连接件安装在端盖上,所述端盖通过螺栓固定安装在球杆的顶端,所述球杆的底端固定设有球头,所述球头活动卡接在球座内,所述球座的底端固定设有连接支架,所述连接支架的下端分别连接有焊点清除刀具和打磨头。
优选的,所述球座的上端通过螺栓设有两个球座端盖,所述球座端盖为半圆环形结构。
优选的,所述刀具分为直形刃刀具和弧形刃刀具,所述直形刃刀具和弧形刃刀具交替均匀分布在刀具安装座底端,所述刀具安装座上设有磁铁片。
优选的,所述驱动轮装置的数量为两个,且对称分布在设备机架的底端,所述驱动轮装置包括轮架、滑块、第三弹簧、驱动轮、转轴、耐磨套、第三电机、轴承和轴承端盖,所述轮架焊接安装在设备机架的底端,且轮架的两端内侧竖向设有滑槽,所述滑槽内滑动设有滑块,所述滑块内固定设有轴承,所述轴承外侧的滑块上设有轴承端盖,且两个轴承内圈固定连接转轴的两端,所述转轴上固定套接有两个驱动轮,两个所述驱动轮之间的转轴上设有耐磨套,所述转轴的一侧固定连接第三电机,所述第三电机安装在滑块上,所述滑块上端通过第三弹簧固定连接轮架的内底端。
优选的,所述焊缝导向装置包括安装板、支撑架、连接架、连接座、磁性导向轮、磁铁轮和导向轮转轴,所述安装板固定焊接在设备机架的底端,且安装板固定设有支撑架,所述支撑架底端固定设有连接架,所述连接架通过开口销活动安装在连接座的固定耳上,所述连接座的下端贯穿设有导向轮转轴,所述导向轮转轴上套接有磁性导向轮,且连接座底端的两侧安装有多个磁铁轮。
优选的,所述连接架的两端设有限位板,所述限位板位于固定耳的两侧,所述磁性导向轮上外表面为内凹结构。
优选的,所述吸尘设备为叶轮式吸尘机,且吸尘设备下端的吸尘设备防护罩安装有收集斗。
与现有技术相比,本发明的有益效果是:
1)本发明中设备机架上安装有多个磁铁块,能为设备提供磁力吸引力,使设备的驱动轮、刀具以及砂包贴紧钢桶表面,当设备沿着焊缝行走时,不会使设备掉落;
2)驱动工作时,通过第三电机驱动转轴转动,从而带动转轴上的两个驱动轮转动,驱动整个设备在钢桶面上行走,且该驱动轮装置为两个,保证行走过程中的稳定性;
3)在行走过程中焊缝导向装置对行走路径进行引导,具体通过磁性导向轮卡到焊缝上,并通过磁力吸附在焊缝上,两侧的磁铁轮弧面与钢桶面吸引,当设备向前行走时磁性导向轮能在焊缝上滚动,磁铁轮能在钢桶面上滚动,当设备清理钢桶面上的焊点时,保证设备不会与焊缝脱轨;
4)焊点清除刀具位于设备机构行走方向的前端,刀具可以通过拉出并拆卸下螺栓,使刀具安装座与连接板分离的方式进行更换,刀具安装机构内设有第二弹簧,保证刀具在旋转过程中紧贴在钢桶弧面上,工作时通过第一电机带动旋转刀座高速转动,使旋转刀座下端的刀具旋转,对焊点进行刮除处理;
5)刀具设计成刀具直面刀刃与弧面刀刃交替分布,当刀具旋转起来,分别适应钢桶的弧面与直面,因此焊点清除得更彻底。
6)设备机构行走方向的后端设有打磨头,打磨工作时,通过第二电机带动旋转座高速转动,砂包紧贴在钢桶的弧面上,通过将已经清除过焊点的钢桶面打磨干净,该砂包材质比较软,上面分布满砂砾,因此在第一弹簧的作用下,砂包能自动适应钢桶弧面,金属环通过螺栓与旋转座连接,用于安装砂包;
7)焊点清除刀具和打磨头均通过安装轴架固定在设备机架的下端,当需要对焊点清除刀具和打磨头进行更换或者维修时,向下拉动安装轴架上的球杆,将端盖拉出焊接套管并将螺栓拆卸下来即可;
8)设备机架上端通过螺栓固定设有吸尘设备防护罩,吸尘设备防护罩安装有收集斗和吸尘设备,该吸尘设备为本领域中常见吸尘设备,通过吸尘设备将清除后的焊点碎屑从吸尘通槽吸附上来,并收集到收集斗内,方便集中处理。
4、附图说明
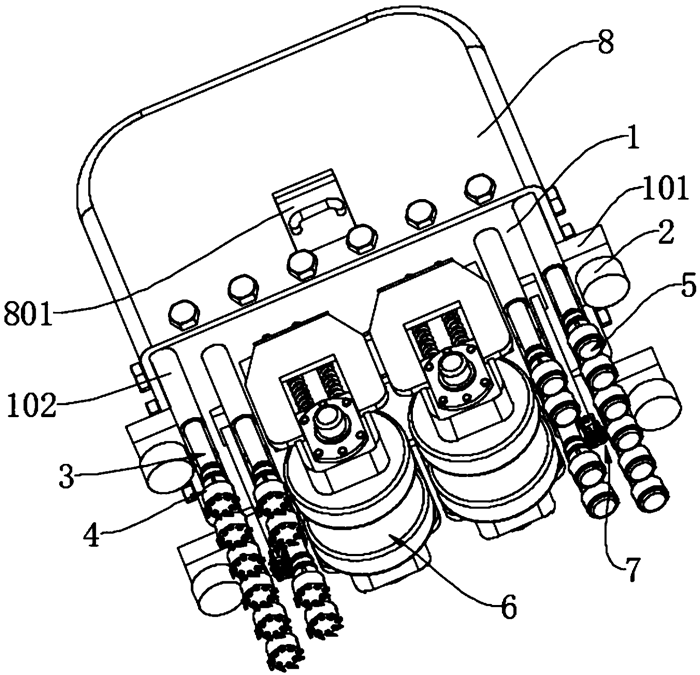
图1为本发明立体结构示意图;
图2为本发明主视图;
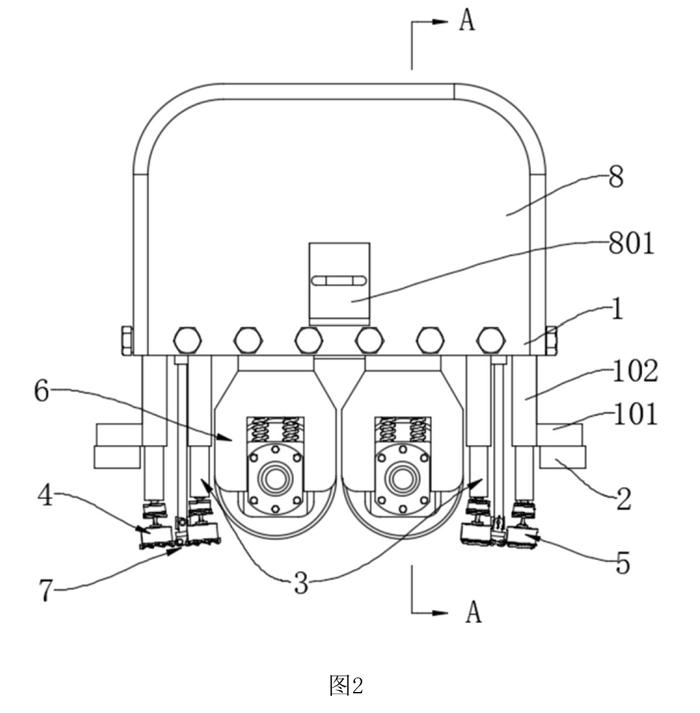
图3为本发明图2中A-A处剖视图;
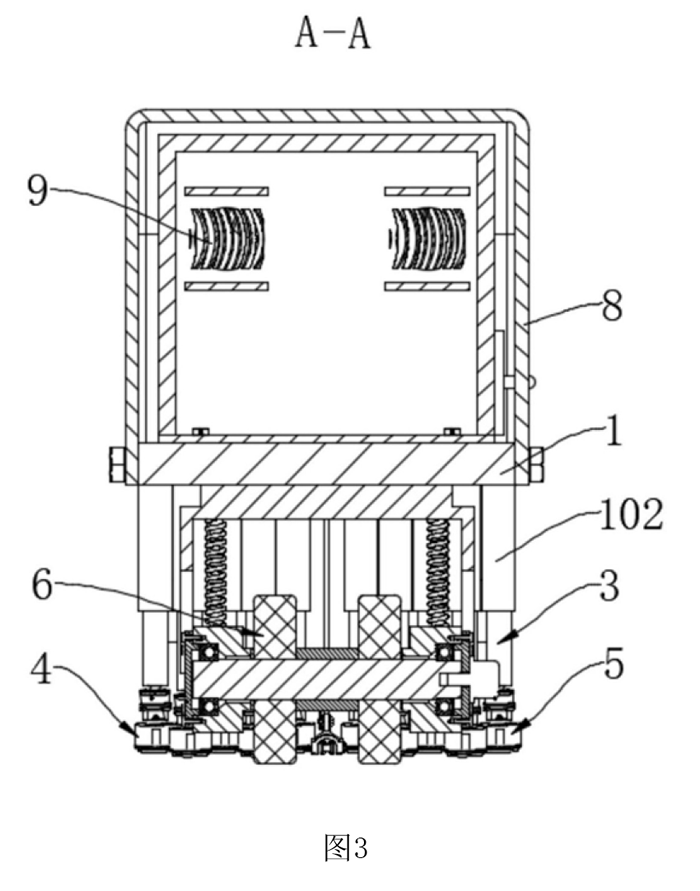
图4为本发明仰视图;
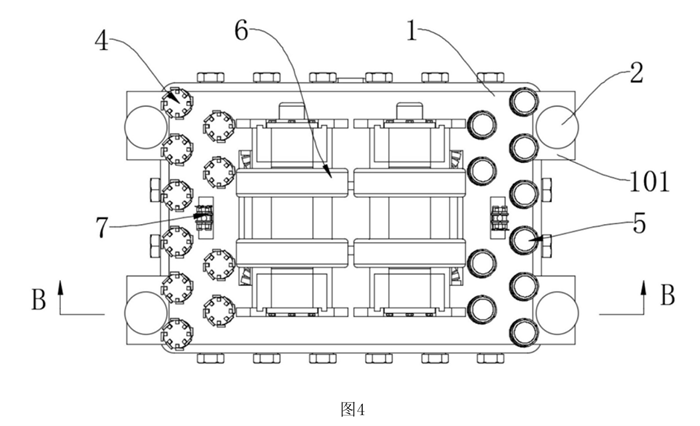
图5为本发明图4中B-B处剖视图;
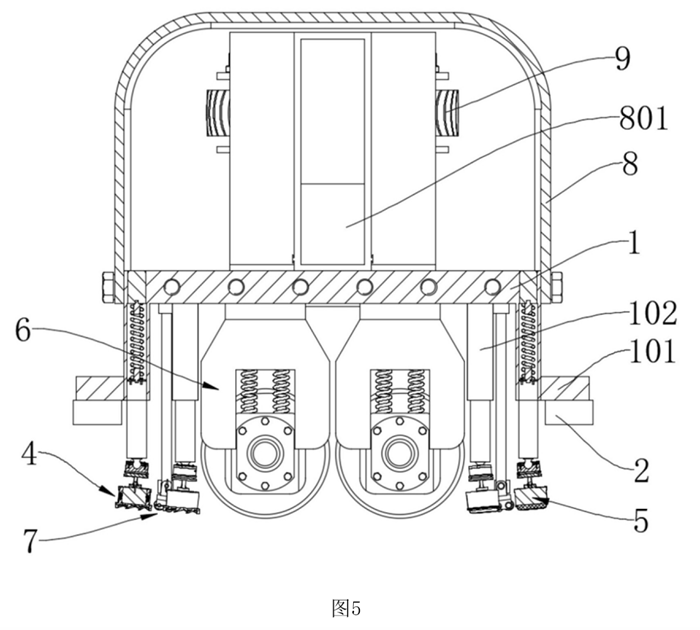
图6为本发明中设备机架结构示意图;
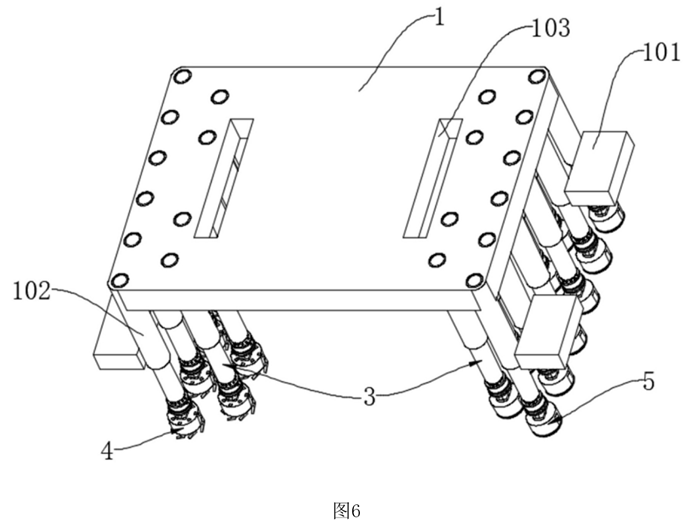
图7为本发明中设备机架俯视图;
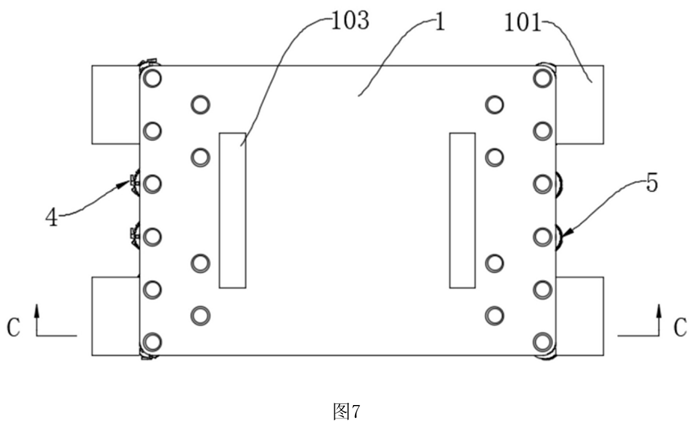
图8为本发明图7中C-C处剖视图;
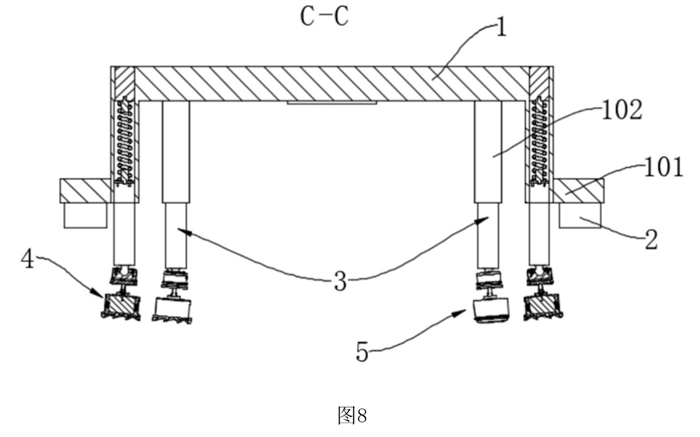
图9为本发明中安装轴架和焊点清除刀具安装结构示意图;
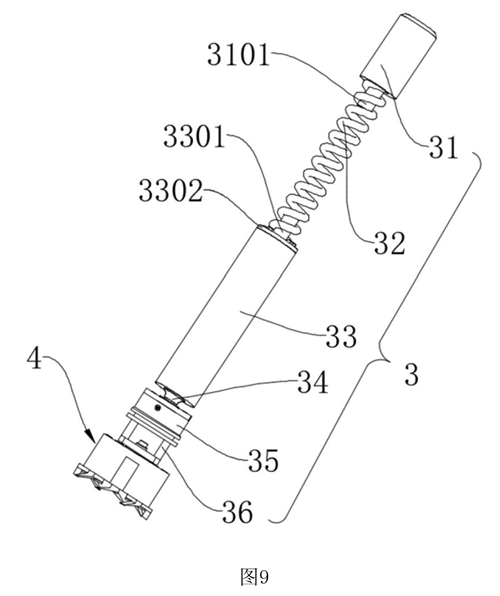
图10为本发明中安装轴架和焊点清除刀具安装结构剖视图;
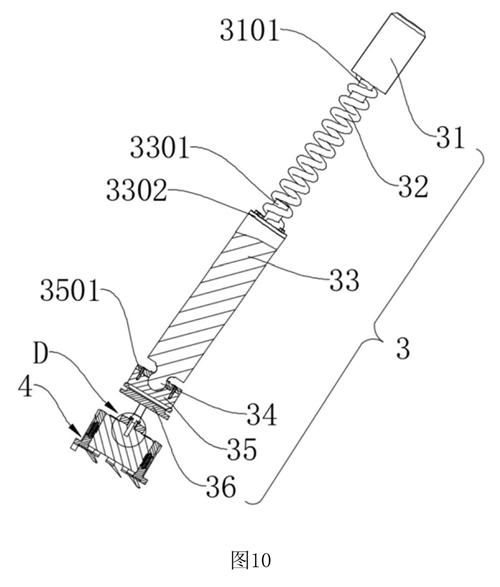
图11为本发明中焊点清除刀具结构示意图;
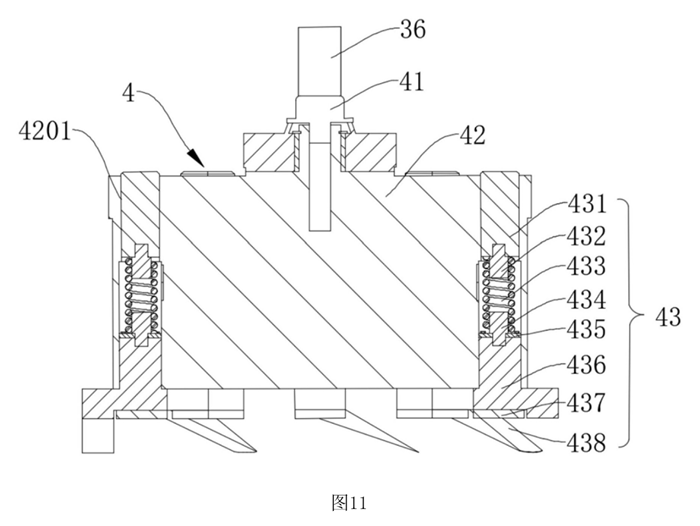
图12为本发明图10中D处放大图;
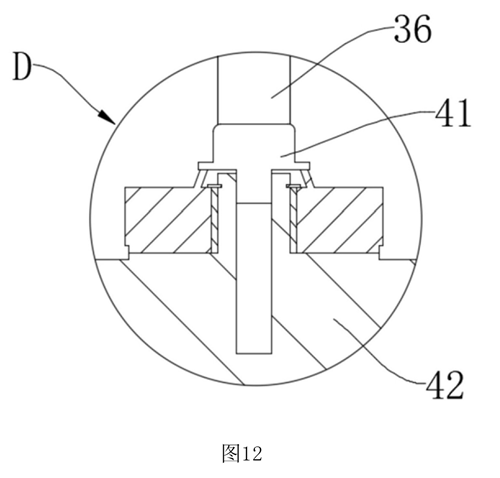
图13为本发明中刀具结构示意图;
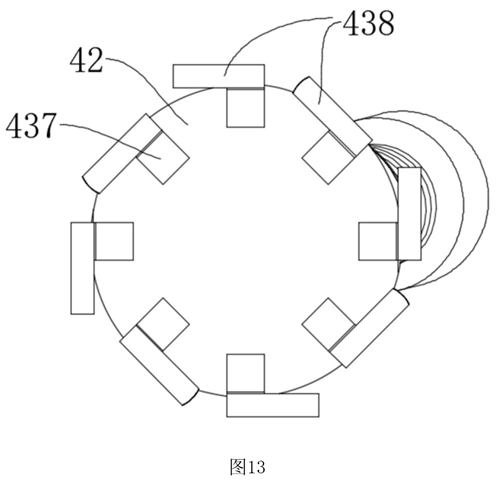
图14为本发明中安装轴架和打磨头安装结构示意图;
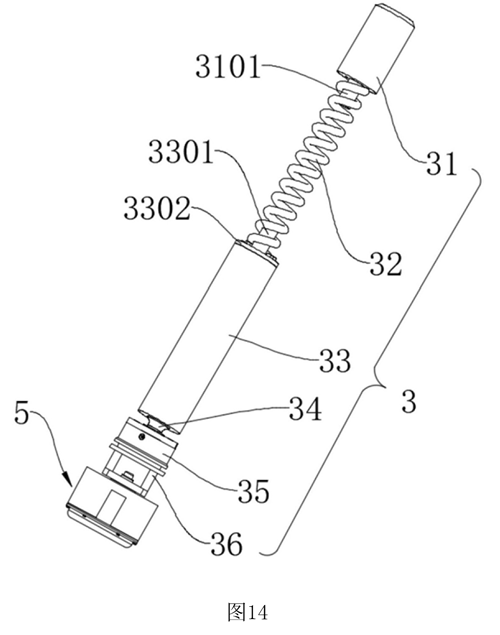
图15为本发明中安装轴架和打磨头安装结构剖视图;
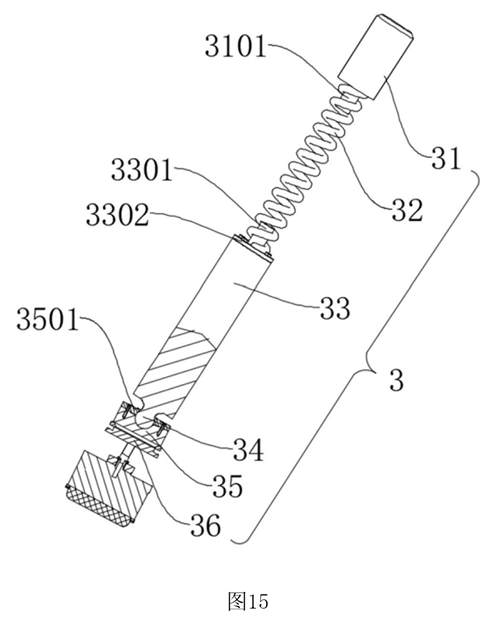
图16为本发明中打磨头结构示意图;
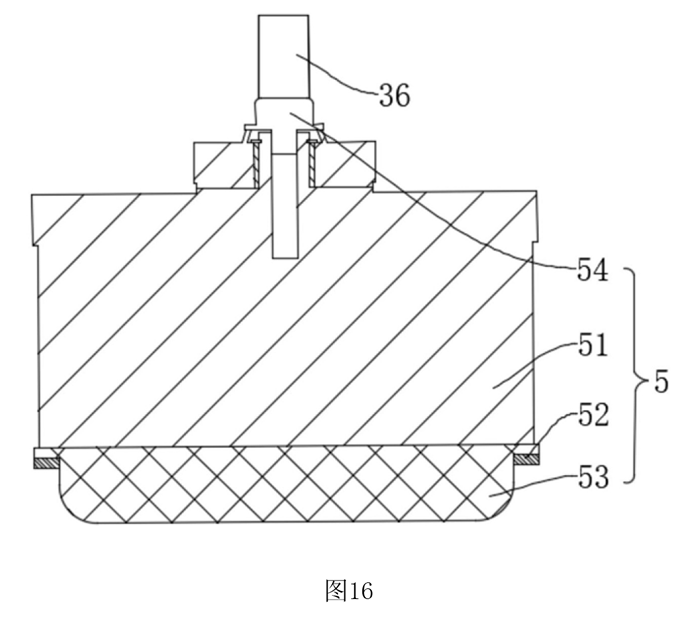
图17为本发明中驱动轮装置立体结构示意图;
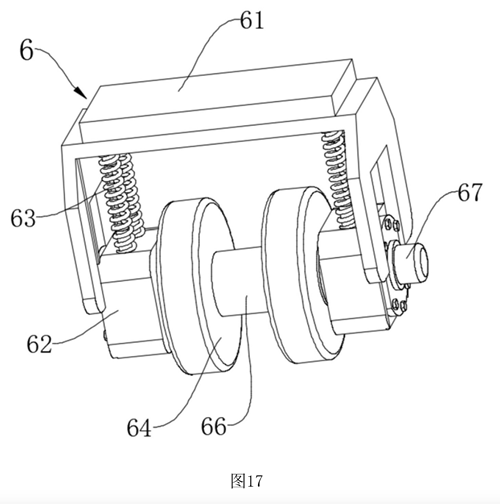
图18为本发明中驱动轮装置结构剖视图;
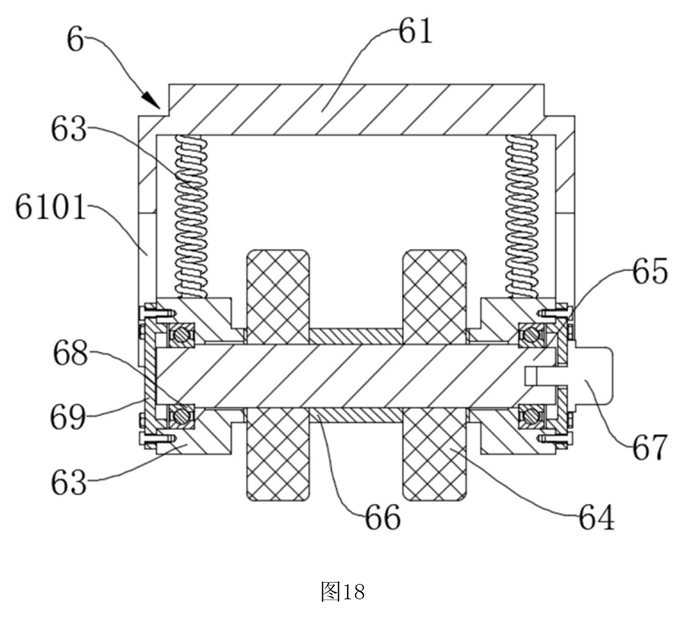
图19为本发明中焊缝导向装置立体结构示意图;
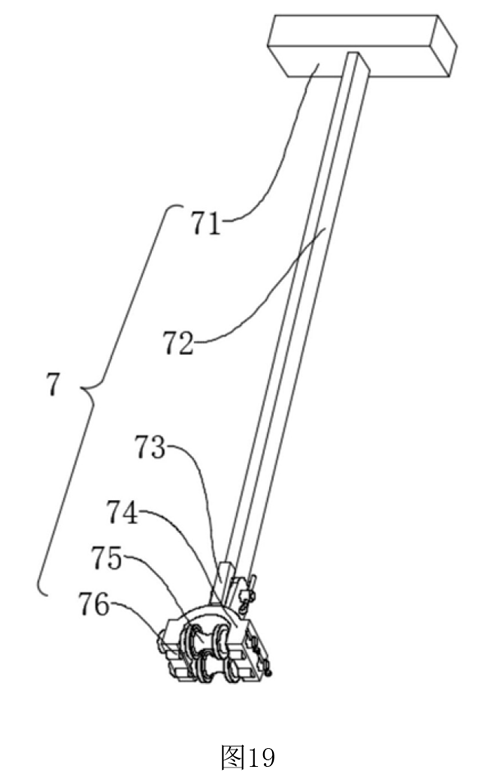
图20为本发明中焊缝导向装置局部剖视图;
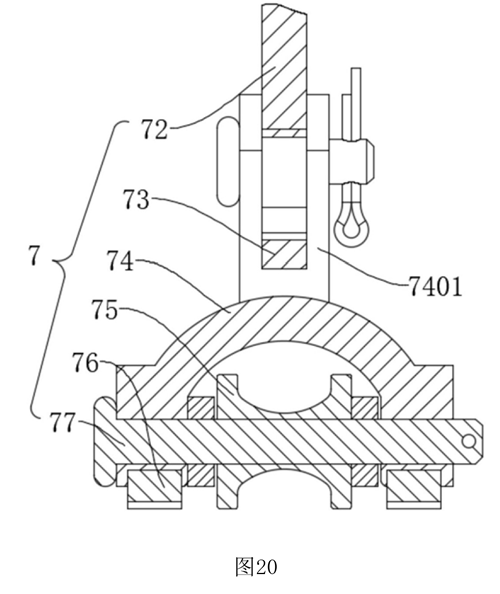
图21为本发明中焊缝导向装置局部侧视图;
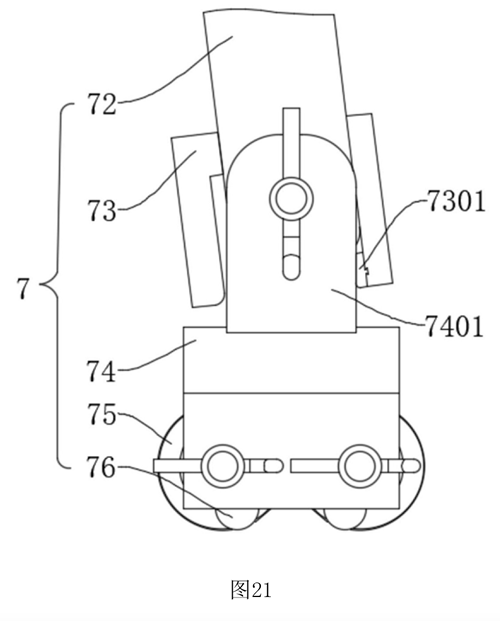
图22为本发明清除桶内环形焊缝状态示意图;
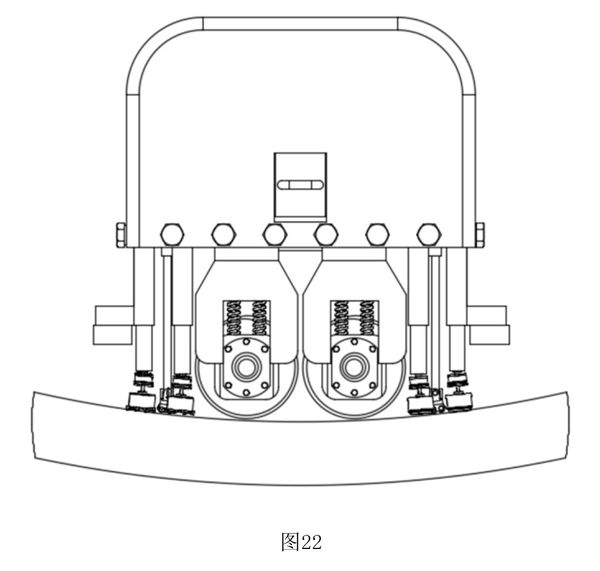
图23为本发明清除桶内直焊缝状态示意图;
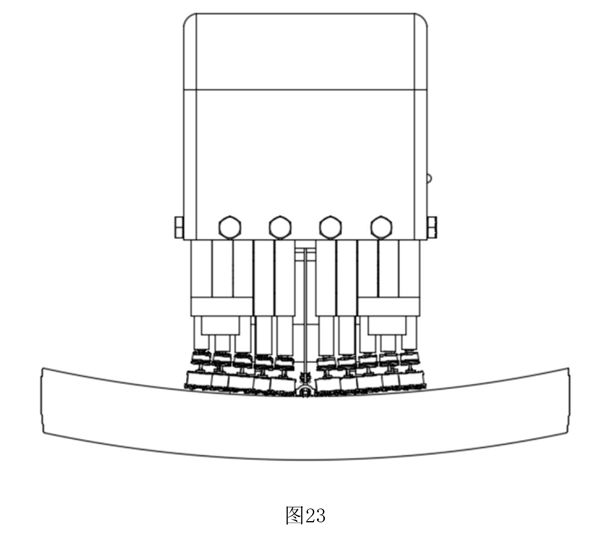
图24为本发明清除桶外环形焊缝状态示意图;
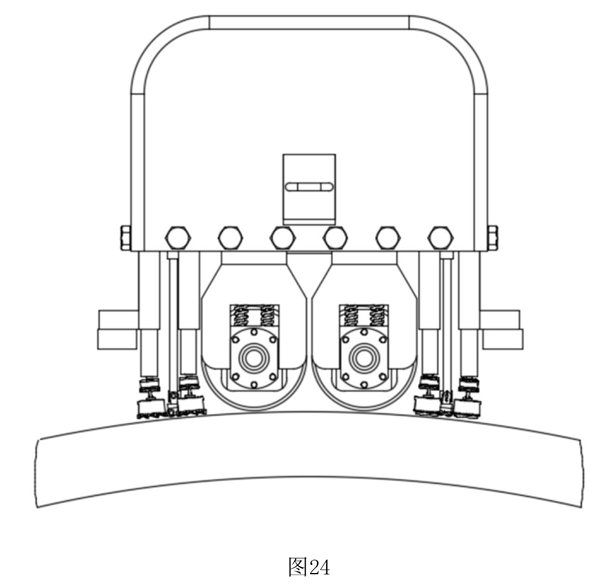
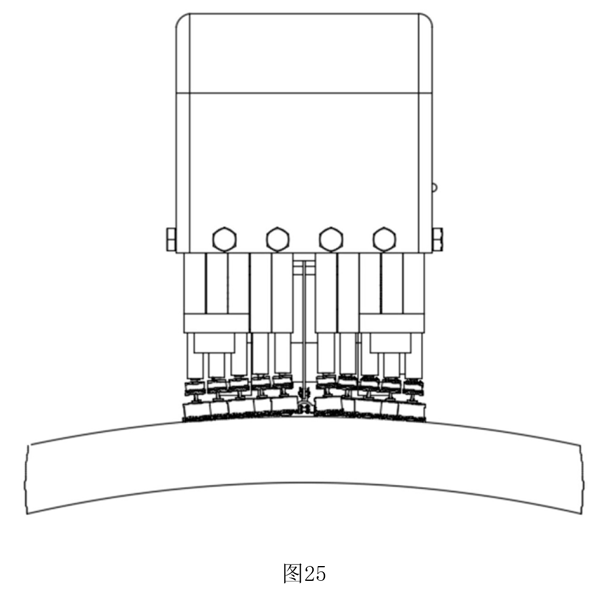
图25为本发明清除桶外直焊缝状态示意图。
图中:设备机架-1、磁铁机架-101、焊接套管-102、吸尘通槽-103、磁铁块-2、安装轴架-3、圆柱销-31、上连接件-3101、第一弹簧-32、球杆-33、下连接件-3301、端盖-3302、球头-34、球座-35、球座端盖-3501、连接支架-36、焊点清除刀具-4、第一电机-41、旋转刀座-42、安装槽-4201、刀具安装机构-43、连接块-431、上限位轴-432、第二弹簧-433、下限位轴-434、连接板-435、刀具安装座-436、磁铁片-437、刀具-438、打磨头-5、旋转座-51、金属环-52、砂包-53、第二电机-54、驱动轮装置-6、轮架-61、滑槽-6101、滑块-62、第三弹簧-63、驱动轮-64、转轴-65、耐磨套-66、第三电机-67、轴承-68、轴承端盖-69、焊缝导向装置-7、安装板-71、支撑架-72、连接架-73、限位板-7301、连接座-74、固定耳-7401、磁性导向轮-75、磁铁轮-76、导向轮转轴-77、吸尘设备防护罩-8、收集斗-801、吸尘设备-9。
5、具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-图25,本发明提供一种技术方案:一种钢桶焊缝周边焊点打磨用自动化安全环保除尘用机器人,包括设备机架1,设备机架1两侧的底面上贯穿设有多个焊接套管102,焊接套管102内均固定设有安装轴架3,安装轴架3包括圆柱销31、第一弹簧32、球杆33、球头34、球座35和连接支架36,圆柱销31固定安装在焊接套管102的上端,该圆柱销31底端设有上连接件3101,上连接件3101固定连接第一弹簧32的一端,第一弹簧32的另一端固定连接下连接件3301,下连接件3301安装在端盖3302上,端盖3302通过螺栓固定安装在球杆33的顶端,球杆33的底端固定设有球头34,球头34活动卡接在球座35内,球座35的底端固定设有连接支架36,连接支架36的下端分别连接有焊点清除刀具4和打磨头5,端盖3302和球杆33之间通过螺栓连接,当需要对安装轴架3下端的焊点清除刀具4和打磨头5进行更换或者维修时,向下拉动球杆33,将端盖3302拉出焊接套管102并将螺栓拆卸下来即可。请参阅图10和图15,球座35的上端通过螺栓设有两个球座端盖3501,球座端盖3501为半圆环形结构,球头34可在球座35内旋转一定角度,因此能使球座35下端的焊点清除刀具4和打磨头5适应钢桶圆弧面。
请参阅图1-图13,位于设备机架1一侧的安装轴架3底端均安装有焊点清除刀具4,焊点清除刀具4包括第一电机41、旋转刀座42和刀具安装机构43,旋转刀座42活动安装在安装轴架3的底端,且旋转刀座42的转轴固定连接第一电机41的驱动轴,第一电机41安装在安装轴架3上,旋转刀座42上竖向贯穿设有多个安装槽4201,安装槽4201内固定设有刀具安装机构43。
请参阅图11,刀具安装机构43包括连接块431、上限位轴432、第二弹簧433、下限位轴434、连接板435、刀具安装座436、磁铁片437和刀具438,连接块431固定焊接在安装槽4201上端,且连接块431下端固定设有上限位轴432,上限位轴432固定连接第二弹簧433的一端,第二弹簧433的另一端固定连接下限位轴434,下限位轴434固定安装在连接板435上,连接板435通过螺栓安装在刀具安装座436顶端,刀具安装座436位于安装槽4201的外底端,该刀具安装座436上固定设有刀具438,该刀具438同样可以通过拉出并拆卸下螺栓,使刀具安装座436与连接板435分离的方式进行更换,刀具安装机构43内设有第二弹簧433,保证刀具438在旋转过程中紧贴在钢桶弧面上,工作时通过第一电机41带动旋转刀座42高速转动,使旋转刀座42下端的刀具438旋转,对焊点进行刮除处理。
请参阅图13,刀具438分为直形刃刀具和弧形刃刀具,直形刃刀具和弧形刃刀具交替均匀分布在刀具安装座436底端,刀具安装座436上设有磁铁片437,将刀具438设计成刀具直面刀刃与弧面刀刃交替分布,当刀具438旋转起来,分别适应钢桶的弧面与直面,因此焊点清除得更彻底,其中磁铁片437为刀具438再提供一个压紧钢桶的力。
请参阅图1-图8和图14-图16,位于设备机架1另一侧的安装轴架3底端均安装有打磨头5,打磨头5包括旋转座51、金属环52、砂包53和第二电机54,旋转座51活动安装在安装轴架3的底端,且旋转座51的转轴固定连接第二电机54的驱动轴,第二电机54安装在安装轴架3上,旋转座51底端通过螺栓固定连接金属环52,金属环52底端固定安装有砂包53,打磨头5上端的安装机构与焊点清除刀具4安装结构一致,在此不做赘述,打磨工作时,通过第二电机54带动旋转座51高速转动,砂包53紧贴在钢桶的弧面上,通过将已经清除过焊点的钢桶面打磨干净,该砂包53材质比较软,上面分布满砂砾,因此在第一弹簧32的作用下,砂包53能自动适应钢桶弧面,金属环52通过螺栓与旋转座51连接,用于安装砂包53。
请参阅图1-图8和图17-图21,设备机架1底面的中间位置上设有多个驱动轮装置6,驱动轮装置6两侧设备机架1底面上分别设有焊缝导向装置7,设备机架1的两侧固定设有多个磁铁机架101,磁铁机架101底端固定设有磁铁块2,该磁铁块2为强力磁铁,其提供的磁力大于整个设备的重力,设备机架1的上端通过螺栓固定设有吸尘设备防护罩8,吸尘设备防护罩8内固定设有吸尘设备9,吸尘设备9两侧的设备机架1上贯穿设有吸尘通槽103,该设备机架1上安装有若干个磁铁块2,能为设备提供磁力吸引力,使设备的驱动轮64、刀具438以及砂包53贴紧钢桶表面,当设备沿着焊缝行走时,不会使设备掉落。
请参阅图1-图5,吸尘设备9为叶轮式吸尘机,且吸尘设备9下端的吸尘设备防护罩8安装有收集斗801,该吸尘设备9为本领域中常见吸尘设备,在此不做赘述,通过吸尘设备9将清除后的焊点碎屑从吸尘通槽103吸附上来,并收集到收集斗801内,方便集中处理。
请参阅图17-图18,驱动轮装置6的数量为两个,且对称分布在设备机架1的底端,驱动轮装置6包括轮架61、滑块62、第三弹簧63、驱动轮64、转轴65、耐磨套66、第三电机67、轴承68和轴承端盖69,轮架61焊接安装在设备机架1的底端,且轮架61的两端内侧竖向设有滑槽6101,滑槽6101内滑动设有滑块62,滑块62内固定设有轴承68,轴承68外侧的滑块62上设有轴承端盖69,且两个轴承68内圈固定连接转轴65的两端,转轴65上固定套接有两个驱动轮64,两个驱动轮64之间的转轴65上设有耐磨套66,转轴65的一侧固定连接第三电机67,第三电机67安装在滑块62上,滑块62上端通过第三弹簧63固定连接轮架61的内底端,通过第三电机67驱动转轴65转动,从而带动转轴65上的两个驱动轮64转动,驱动整个设备在钢桶面上行走,且该驱动轮装置6为两个,保证行走过程中的稳定性。
请参阅图19-图21,焊缝导向装置7包括安装板71、支撑架72、连接架73、连接座74、磁性导向轮75、磁铁轮76和导向轮转轴77,安装板71固定焊接在设备机架1的底端,且安装板71固定设有支撑架72,支撑架72底端固定设有连接架73,连接架73通过开口销活动安装在连接座74的固定耳7401上,连接座74的下端贯穿设有导向轮转轴77,导向轮转轴77上套接有磁性导向轮75,且连接座74底端的两侧安装有多个磁铁轮76,工作时磁性导向轮75卡到焊缝上,并通过磁力吸附在焊缝上,两侧的磁铁轮76弧面与钢桶面吸引,当设备向前行走时磁性导向轮75能在焊缝上滚动,磁铁轮76能在钢桶面上滚动,当设备清理钢桶面上的焊点时,此结构保证设备的稳定,不会与焊缝脱轨。
连接架73的两端设有限位板7301,限位板7301位于固定耳7401的两侧,磁性导向轮75上外表面为内凹结构,圆桶上的焊缝凸出部分形状与磁性导向轮75表面内凹的轮廓弧度接近或者相吻合。
工作原理:本发明中设备机架1上安装有多个磁铁块2,能为设备提供磁力吸引力,使设备的驱动轮64、刀具438以及砂包53贴紧钢桶表面,当设备沿着焊缝行走时,不会使设备掉落;其驱动工作时,通过第三电机67驱动转轴65转动,从而带动转轴65上的两个驱动轮64转动,驱动整个设备在钢桶面上行走,且该驱动轮装置6为两个,保证行走过程中的稳定性;在行走过程中焊缝导向装置7对行走路径进行引导,具体通过磁性导向轮75卡到焊缝上,并通过磁力吸附在焊缝上,两侧的磁铁轮76弧面与钢桶面吸引,当设备向前行走时磁性导向轮75能在焊缝上滚动,磁铁轮76能在钢桶面上滚动,当设备清理钢桶面上的焊点时,保证设备不会与焊缝脱轨;焊点清除刀具4位于设备机构1行走方向的前端,刀具438可以通过拉出并拆卸下螺栓,使刀具安装座436与连接板435分离的方式进行更换,刀具安装机构43内设有第二弹簧433,保证刀具438在旋转过程中紧贴在钢桶弧面上,工作时通过第一电机41带动旋转刀座42高速转动,使旋转刀座42下端的刀具438旋转,对焊点进行刮除处理;设备机构1行走方向的后端设有打磨头5,打磨工作时,通过第二电机54带动旋转座51高速转动,砂包53紧贴在钢桶的弧面上,通过将已经清除过焊点的钢桶面打磨干净,该砂包53材质比较软,上面分布满砂砾,因此在第一弹簧32的作用下,砂包53能自动适应钢桶弧面,金属环52通过螺栓与旋转座51连接,用于安装砂包53;其中焊点清除刀具4和打磨头5均通过安装轴架3固定在设备机架1的下端,当需要对焊点清除刀具4和打磨头5进行更换或者维修时,向下拉动安装轴架3上的球杆33,将端盖3302拉出焊接套管102并将螺栓拆卸下来即可;在设备机架1上端通过螺栓固定设有吸尘设备防护罩8,吸尘设备防护罩8安装有收集斗801和吸尘设备9,该吸尘设备9为本领域中常见吸尘设备,通过吸尘设备9将清除后的焊点碎屑从吸尘通槽103吸附上来,并收集到收集斗801内,方便集中处理。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
|

