|
核废料钢桶自动抓放吊运装置设计
文/李明,邓智勇,谢金辉,朱刚
摘要:在工程现场吊运核废料桶时,一般有核级吊车与电葫芦吊运两种方式,核级吊车成本高、维护困难,电葫芦需要人工抓取,威胁到人身安全。文中结合实际情况,基于电葫芦吊运基础设计了一种废料桶自动抓取吊运装置,装置结构简单可靠,依靠自身重力进行废料桶的抓放,完成废料桶吊运工作。
关键词:核级吊车,核废料,电葫芦,自动抓取。
0 引言
工程现场移动核废料桶有两种方法,一种是远程遥控核级吊车完成自动抓放与吊运工作,自动抓取机械手由电气控制,驱动执行机构完成自动抓取动作,抓取机械手上装有摄像头.帮助工作人员判断目标位置,精度较高。但是电气设备结构复杂,其可靠性容易受到环境影响,在高温高湿高冲击环境下电气元件容易失效,且成本较高,维护困难。另一种是电葫芦吊运方法,在电葫芦上安装吊爪,由工作人员完成废料桶的抓放工作,工作人员与废料桶不可避免地产生近距离接触,虽然桶壁经过特殊处理、大幅度降低了放射性水平,但近距离长时间接触,仍然威胁到工作人员的人身安全。这种背景下,本文结合下程实际,设计了一种自动抓放吊运装悝,在电葫芦上安装一个机械式夹具,该夹具利用滑块沿轨平动原理,借鉴圆珠笔机构,利用自身重力完成废料桶的抓取与吊运工作。
1 装置的组成
装置由电葫芦和机械式夹具两部分组成。电葫芦安装在天车或龙门吊上,机械式夹具直接吊装在电葫芦上,遥控移动夹具到废料桶正上方,放下夹具,夹具依靠自身重力抓取废料桶,遥控电葫芦提起废料桶,移动到目标地点后,放下夹具,夹具依靠自身重力释放废料桶,完成废料桶的吊运工作。自动抓放夹具主要由两部分组成,结构如图1 所示。
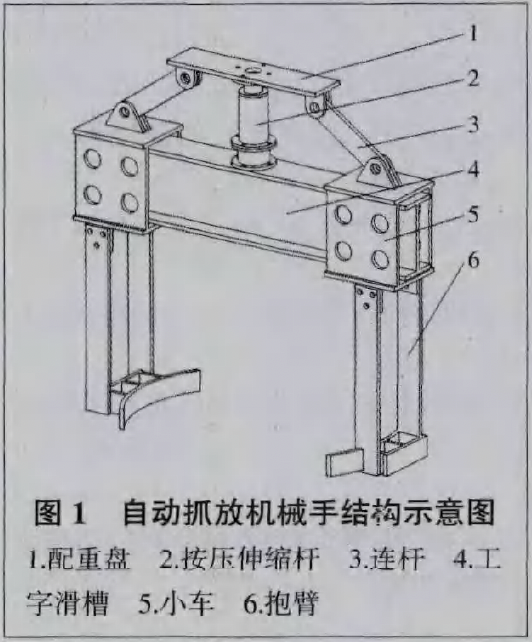
其一是伸缩机构,包括配重盘和按压伸缩杆等两部分。配重盘放下与提起时压缩按压伸缩杆,使其伸长或缩短。其二是滑动抱臂部分,由连杆、工字滑槽、小车、抱臂等4 部分组成。连杆一端与配重盘连接,另一端与小车连接,当伸缩机构伸长或缩短时,连杆带动小车在工字滑槽内向内或向外滑动。抱臂固定在小车上,随着小车的内外滑动,抱臂抱合或张开,实现废料桶的抓取与释放。
2 按压伸缩杆原理
按压伸缩杆借鉴圆珠笔自动伸缩原理,其结构图如图2 所示。
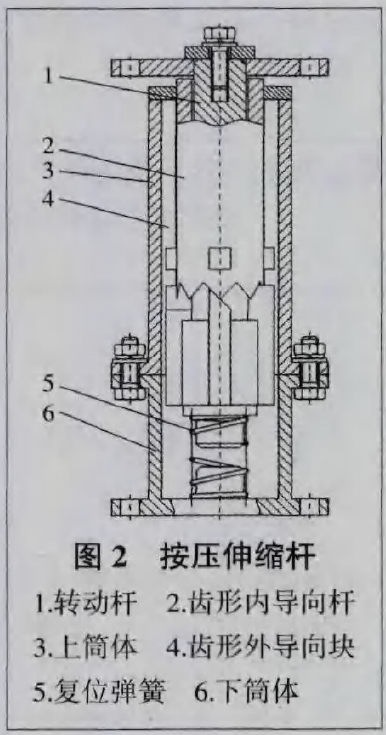
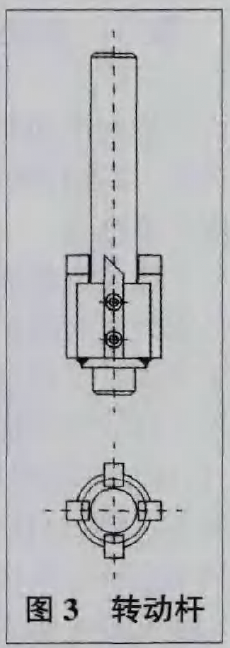
按压伸缩杆由转动杆、齿形内导向杆、上桶体、齿形外导向块、复位弹簧、下桶体等几部分组成。其中转动杆如图3 所示,齿形内导向杆如图4 所示。

4 个齿形外导向块4 均匀嵌在上筒体3 上,如图5 所示,齿形导向块相邻两面形成导向滑槽。

在开始阶段,按压伸缩杆处于自锁状态,转动杆上的樑形块卡在上筒体内的齿形外导向块内,限制了转动杆上升,从而限制了配重盘与工字滑槽之间的距离,连杆向外张开,吊钩通过配重盘,按压伸缩杆提起下字滑槽和小车。
抓取废料桶过程:电葫芦下放夹具,在工字滑槽停留在桶盖上方后,吊钩继续下放,配重盘在重力作用下,按压伸缩杆内的弹簧压缩,使转动杆下移,直至上安装板接触按压伸缩杆壳体,吊钩提升,转动杆在弹簧的作用力下,沿齿形内导向杆的齿形面运动,使转动杆转过一个角度,越过按压伸缩杆齿形槽,吊钩继续提升,转动杆上的桵形块沿齿形槽外斜面滑入齿形槽间的间隙,自锁解除,转动杆继续上升,此时,连杆内收,在连杆的带动下,小车向中间移动,直至抱臂抱住废料桶桶身。
释放废料桶过程:电葫芦下放夹具和废料桶,待废料桶着地后,继续下放夹具,工字滑槽压上废料桶桶盖后,配重盘自重通过连杆将两小车向外侧推开,从而使抱臂松升释放废料桶,将配重盘下放至最低位置后,提升吊具,转动杆上楔形块在弹簧的作用力下,沿齿形内导向杆斜面运动、使转动杆旋转一个角度,继续提升,转动杆上的楔形块滑入按压伸缩杆壳体内的齿形槽,形成自锁,吊钩通过按斥仲缩杆提升T 宇滑槽和小车。依次往复,完成废料桶的吊运。
3 夹具的维护与保养
夹具初次使用前需向按压伸缩杆内注入少量润滑油,所有铰接处轴承处均注润滑脂。定期检查导轨,清除导轨内侧上的杂物,保证小车运动顺畅定期检查各连接处是否有松动现象。若有松动之处,则加固。
若夹具不能正常抓取或释放废料桶,原因可能有:异物卡住小车;异物卡入按压伸缩杆;复位弹簧失效等。应对措施为:检查原因,去除异物或者更换弹簧。
4 结语
工程实践证明,该装置能够准确抓放和移动废料桶。自动抓取夹具为纯机械结构, 与电气夹具相比具有结构简单可靠、维护方便、成本较低等优点、且安装方便,可在传统电葫芦吊具上直接安装使用,具有较大的通用性。
|

